Monday, May 9, 2011
Thursday, May 5, 2011
Sunday, May 1, 2011



Friday, April 29, 2011
Almost finished
We were able to obtain excellent movement. However, we made our board a little small and it sags in the middle. Thus we can't get the full range of motion to play an entire chess game yet. We decided to mount metal poles to the sides to extend the range of support. Also, the poles ideally should keep it straight. The pictures of the new board setup are shown below. Unfortunately the board still sags in the middle. Today will consist of carefully setting up the board to try to get full use of the board. It is not easy because if the board is a little higher in one location, then the magnet can't attract the piece.






movement
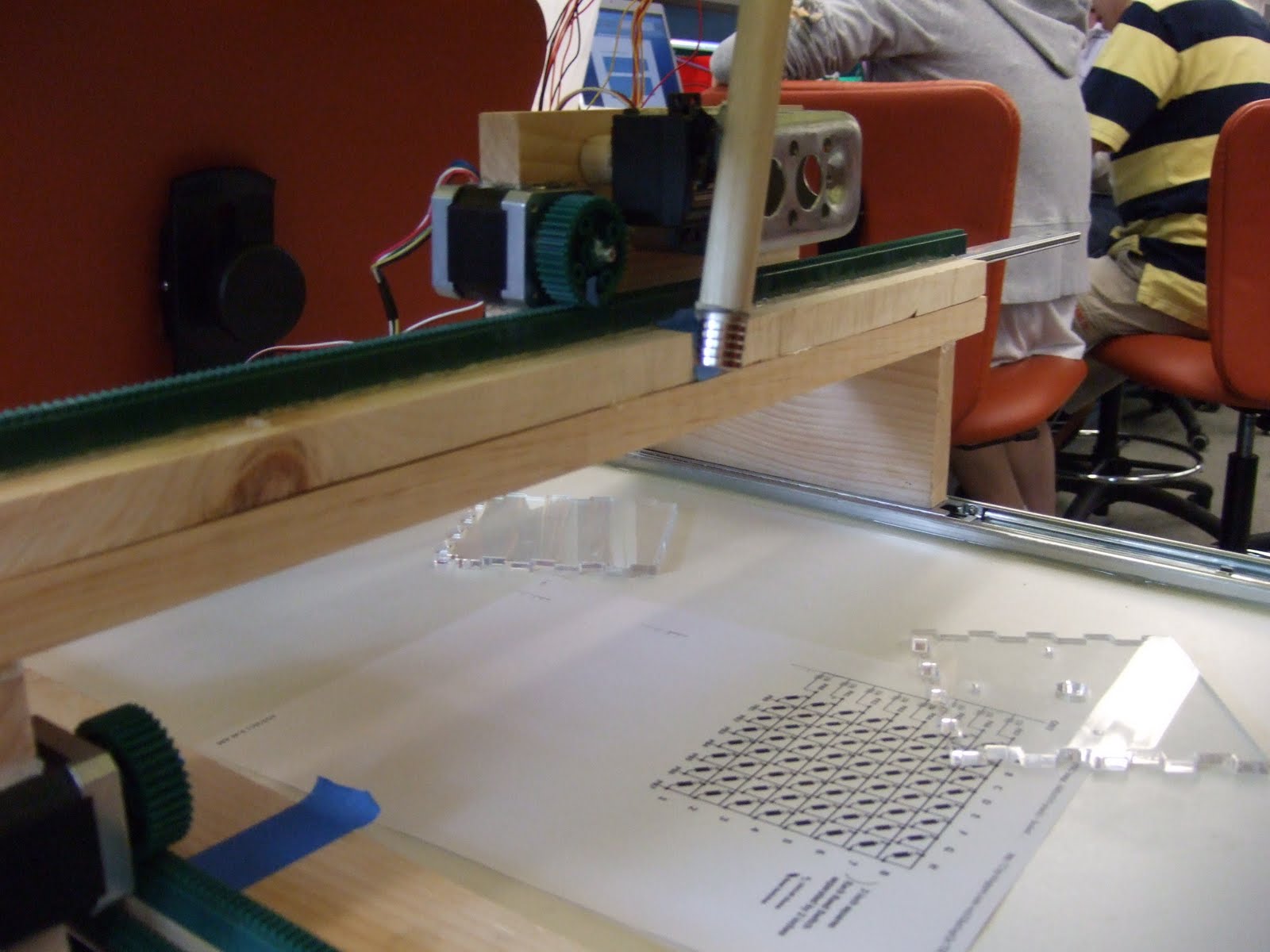
We were able to get accurate movement of the pieces with the XY positioner. Here is a really cool video. More videos to come...
The xy table is finished
We finished building the XY positoner table. It works very well; the stepper motors are extremely accurate and return exactly to the starting location. Here are some cool pictures of it.









Monday, April 25, 2011
Monday
Now that we finally have all the parts, we continued construction on the XY plotter system. This system will move the computer's chess pieces by positioning the magnet below the board. Once the magnet is in position, the magnet can be raised or lowered, thereby either attracting or disengaging the above chess piece.

With no fans or air conditioner and 85 degree weather, Brian in his jeans made a tremendous effort to cut the wood.

To mount the motors we decided to have them embed into the beams of wood, as shown above. The height of the cut-out needed to be exact; too high and the gear would not reach the linear gear set, too low and the board would not be able to attach to the sliding draws. Glue was layered around the insert to adhere the motor in place.

As well as mounting the motor, we also mounted the support beams that attach to the two sliding rails. Later the cross beam with an additional sliding rail and motor system will sit on top of these beams. We are hopeful that by Wednesday we will have finished construction.
Sunday, April 24, 2011
Another successful week of work on the board
A lot of progress has been made. We’ve got about 400 lines of code written. We’ve been writing the code to detect the human movement and code to have the motors move the magnet and place the computer’s pieces.
On Monday we received the magnetic Reed switches. After testing them we found that they were exactly perfect for what we needed. We were very lucky.
Tuesday we weaved all the wiring for the chessboard and finished wiring for the two stepper motors. It needed to look clean because there will be a lot of wires from the chessboard. Here is a picture of the wiring for the stepper motors:

On Wednesday we worked on more code and glued the punchboards together into one 2 foot by 2 foot board. Here the board can be seen being glued:

On Thursday we soldered on all 64 reed switches exactly in the center of each 3 inch by 3 inch square. This was very tedious and took forever.
On Friday we discovered that our circuit diagram for the chessboard detection was wrong. The way we had it designed was so that the chessboard would act like a keypad and only be able to detect one magnetic piece at a time. With three or more pieces there would be ghosting and shorting of wires that would just destroy any hopes of determining what squares the magnets were on. We were very lucky that we found an easy solution to this: We just had to wire a 1N4148 diode in series with each switch to the input rows. We also had to change the RTI to send only 1 column high at a time and the rest low, instead of keeping all columns high and sending 1 low at a time. These two changes resulted in there being no shorts of 5V to inputs from other columns when a single column was driven high because the diodes stop current flow in the wrong direction and act as open circuits. For more detail see http://www.dribin.org/dave/keyboard/one_html/. We used 1N4148 diodes because they have a faster switching time than 1N4004 diodes. Here is the new diagram:



We also got the final parts we needed to begin construction on the XY-positioning system; The circular gear:

Tim was awesome and drilled the holes in the gear mount so that we could connect our stepper motors to the gears. The pack of gears we ordered came with two sizes of circular gears; a 1-inch radius gear and a half-inch radius gear. We chose to use the half-inch gear so that there would be less torque on the motors and therefore help make sure that the motor will in fact turn the gears on the XY table.
On Saturday we started working on the XY table again. We glued a gear to a motor:

We also found that we will need to raise the linear gears so that the smaller gear can come in contact with the teeth of the linear gears.

This will consist of a lot of construction and testing. Luckily we only have two days of classes and no more homework for any of them.
Subscribe to:
Posts (Atom)